项目主持:尹晓红
项目团队:尹晓红 李泳鲜 周武 夏文俊 孟国连
(1)研究意义和背景
轮式移动机器人一般由控制器、电机、导引装置、电源及车体等零部件组成,因具有自动化程度高、适应性强及可靠性好等优点而被广泛应用。目前,绝大多数轮式移动机器人都使用电池供电。然而,由于电池容量有限,轮式移动机器人的作业时间十分有限。因此,考虑轮式移动机器人的能量优化以增加其持续作业时间已成为一个重要的研究课题。
目前有关轮式移动机器人轨迹跟踪控制的研究前人已取得了许多重要研究成果,控制方法涵盖了PID控制、Backstepping控制、自适应控制、滑模控制、智能控制等。然而,基于能量优化的轮式移动机器人轨迹跟踪控制方法鲜有报道;跟踪模型建立、跟踪控制算法设计、能耗模型建立与节能控制方案选择等方面的研究也相对独立。
鉴于此,尹晓红博士主持的国家自然科学基金青年项目“基于能量优化的轮式移动机器人轨迹跟踪控制技术研究(51305406)”旨在针对轮式移动机器人在运动过程中既要求精确跟踪又要求能量优化的特点,而现有方法在跟踪策略设计、能耗模型建立及节能控制方案选择等方面研究相互独立的现状,提出了一种轨迹跟踪和能量优化统一控制的理论与方法。首先,开展了非完整轮式移动机器人轨迹跟踪控制研究和能耗研究,分别建立了其运动学/动力学跟踪误差模型和能耗模型,在此基础上深入研究了两者之间的内在关联机制,建立了关联模型;其次,开展了基于能量优化策略的轮式移动机器人轨迹跟踪控制研究,基于上述关联模型,以能量损耗作为目标函数,并同时具有三个约束,设计了一种基于能量优化策略的轮式移动机器人轨迹跟踪控制器,实现轮式移动机器人轨迹跟踪过程中的能量最优化。本研究有效实现了非完整控制系统运动控制和能量优化的有机结合,为实现跟踪/节能两者的统一控制开启了新的研究思路。
(2)关联模型
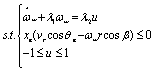
基于能量优化的轮式移动机器人轨迹跟踪控制问题可认为是多约束优化问题。该问题以能量损耗作为目标函数,并同时具有三个约束,即状态约束方程式、系统状态方程式以及系统控制约束方程式,具体优化数学模型如下:
![]()
式中
![]() ,
,
![]() 。
。
上述优化问题利用计算机算法(如遗传算法)求得的最优解为
![]() ,)即可得到轮式移动机器人车体最优线速度为
,)即可得到轮式移动机器人车体最优线速度为
![]() ,即WMR最优控制率为:
,即WMR最优控制率为:
![]()
(3)控制实质
在只考虑驱动电机能耗的情况下,寻找最优控制
![]() ,使对于任意初始误差
,使对于任意初始误差
![]() ,系统在该控制输入的作用下实现
,系统在该控制输入的作用下实现
![]() 有界且
有界且
![]() ,同时电机能耗有最小值,即找到解析解最小化目标函数式(15)。控制框图如图1所示。
,同时电机能耗有最小值,即找到解析解最小化目标函数式(15)。控制框图如图1所示。
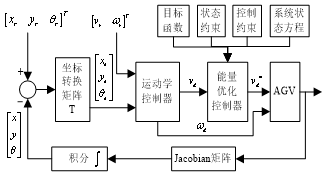
图1 控制框图
部分控制结果图
|
|
(a) |
(b) |
|
|
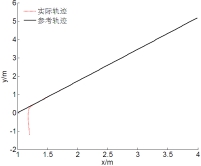
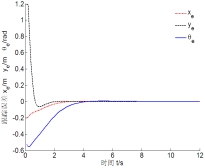
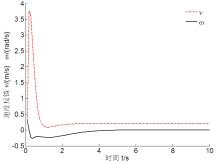
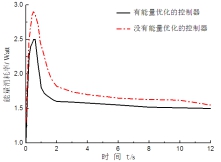
图2直线跟踪控制仿真结果图